| EX | Working with LiDAR data |
Example: LiDAR point clouds I/O and clipping
Since the LiDAR data can be quite large and needs higher processing power, only a small example is taken here. We will be using point cloud data and derive usable lidar metrics using the lidR package.
Please refer here to get a detailed idea of what all can be done using LiDAR data.
Downloading LiDAR point cloud data
You can download the example point cloud data here
Input/Output, Clipping and Visualizing point clouds
This following code shows you a simple input/output command and lidR::clip, which is similar to raster::crop and a simple 3D visualization.
# load the following libraries
library(lidR)
library(sf)
library(terra) # the new lidR updates depend on terra functions
library(gstat)
# load in the example study area
aoi <- st_read("data/lidarArea.gpkg")
# load in the example point cloud file
point_cloud <- readLAS("data/flm1.las") #point cloud for Lower Montane forest in Mt. Kilimanjaro
#check class
class(point_cloud) #"LAS"
# set crs to the point cloud
st_crs(point_cloud) <- 32737 # WGS 84 , UTM37S
# crop out study area
flm1 <- clip_roi(point_cloud,aoi) #function 'lasclip' has been deprecated
# have a look at Lidar data structure
head(flm1@data)
X Y Z Intensity ReturnNumber NumberOfReturns ScanDirectionFlag EdgeOfFlightline Classification Synthetic_flag Keypoint_flag Withheld_flag ScanAngleRank UserData PointSourceID
# 303983.1 9649715 1903.269 0 3 3 0 0 2 FALSE FALSE FALSE -5 0 0
# 303983.1 9649715 1903.400 0 6 6 0 0 0 FALSE FALSE FALSE -5 0 0
# have a look at the range of intensity
range(flm1@data$Intensity)
# 0 34930
# unique classification
unique(flm1@data$Classification) # ground data is class 2, 0 is unidentified
# 2 0
#to clean up the RAM
rm(point_cloud) #removes larger point cloud and frees up our space
gc() #garbage collector for cleaning the RAM
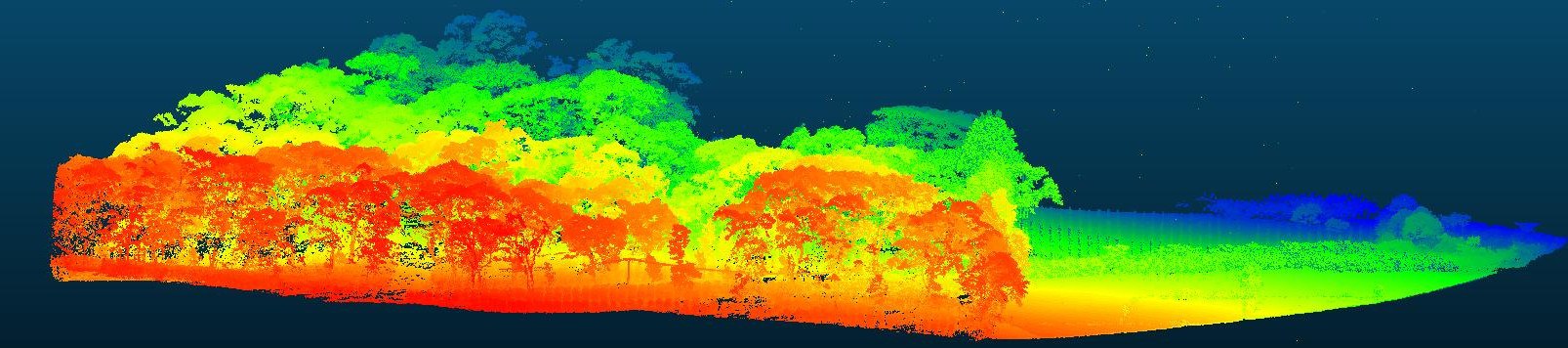
# 3D visualization
plot(flm1) #plotting las files will open a new window , you can move the data in 360 degress to notice the vegetation structure
#save the output
writeLAS(flm1, "./data/flm1_clipped.las")
Task 1
- Plot the LiDAR data again, but experiment with different columns for the coloring of the points
- What information could you gain from these plots?
- Filter the LiDAR data. Only keep points above an intensity value of 300. (Hint- use
lidR::filter_poi) - Plot them. What points are these? What could you do with those points?
- Filter the LiDAR data. Only keep the first returns. (Hint- use
lidR::filter_poi) - Plot them. What points are these? What could you do with those points?